技术深扒:特斯拉FSD的安全承诺为何总是“跳票”
作为一个长期关注自动驾驶行业的技术观察者,我必须说,马斯克关于FSD安全性的表态已经形成了一套固定的叙事模式。每次都是几乎相同的措辞,每次都是“远超人类”的承诺,每次都完美错过了兑现的时间节点。
这种模式首次出现是在2023年FSDV12版本发布前。当时的措辞与今天几乎一字不差,核心论据同样是“平均每530万英里才发生一次碰撞”。结果呢?V12确实带来了功能改进,但距离“超越人类”仍有本质差距。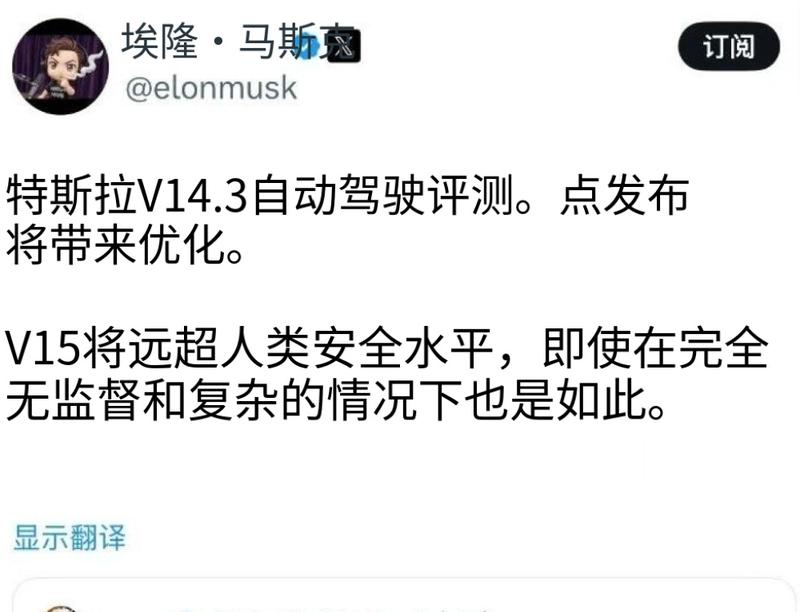
数据背后的对比陷阱
特斯拉官方数据的逻辑存在根本性问题:FSD的使用场景高度集中于高速公路——这恰恰是事故率最低的路况。而拿来对比的人类驾驶数据,却包含了城市道路、乡村道路等全场景。更不用说特斯拉车主群体普遍车龄较新、驾驶习惯相对谨慎这些因素。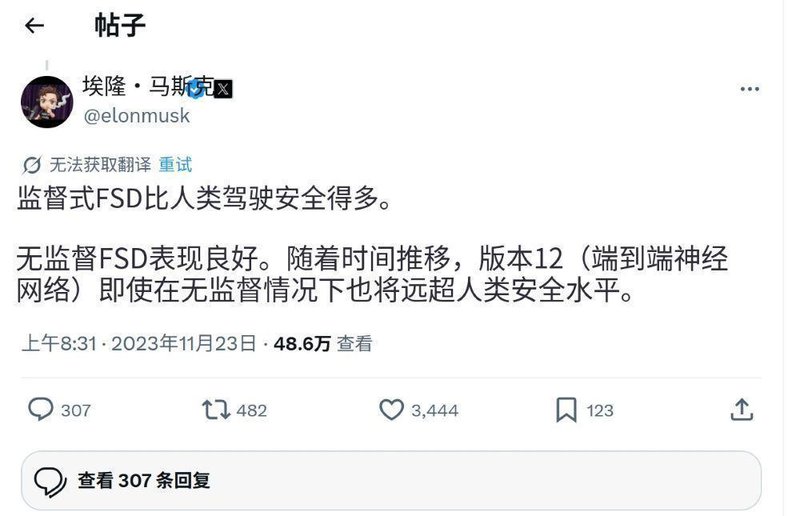
所以那个“安全倍数七到十倍”的结论,在统计学意义上并不成立。更关键的是,这些数据从未经过第三方独立评审,严格来说只能算作企业单方面宣称。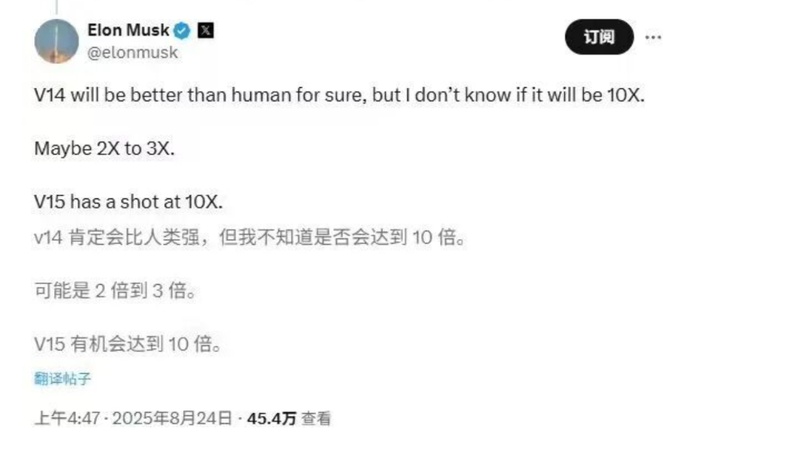
监管层面的三重压力
与马斯克的乐观形成鲜明对照的是NHTSA的调查正在收紧。三项独立调查同时推进,其中始于2024年10月的那项已经从初步评估升级为工程分析——这在美国监管流程中意味着距离大规模召回只差一步。
调查揭示的核心问题指向特斯拉2021年放弃雷达、全面转向纯视觉方案的技术路线。在强光、灰尘等低能见度环境下,摄像头性能下降时系统无法自我感知,往往在事故即将发生时才有反应。
承诺与现实的第三次背离
V14.3版本确实有技术突破,重写AI编译器后系统反应速度提升了20%。但这种渐进式改进与“远超人类”的宏大叙事之间,差距依然显著。
当一个安全承诺以相同措辞第三次出现,而前两次都悄然落空,市场信任正在被系统性消耗。自动驾驶的实现可以是漫长的过程,但承诺若总是跑在技术前面,消耗的就不仅是耐心。技术观察者需要的是可验证的进展,而非反复跳票的乐观宣言。